A regulator positive/negative determination method
Automatic adjustment system: often after the control scheme is determined well and the regulator's positive/negative effect is judged, the most critical is how to set the P, I, and D parameters. Based on years of on-site work experience, talk about how to set the tuning system. , I, D parameters, please refer to the project.
Before adjusting the P, I, D parameters of the control system, it must be ensured that a closed-loop control system must be negative feedback, ie Ko*Kv*Kc >0.
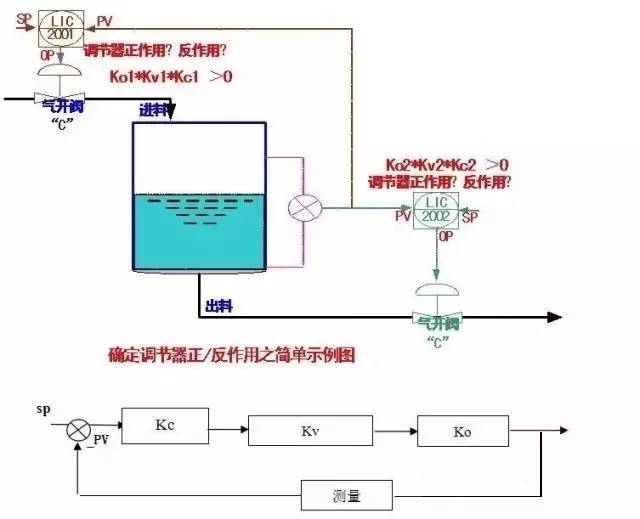
Adjustment object Ko:
If the valve and actuator are large and the measured PV increases, then Ko>0; otherwise, Ko<0;
Regulating valve Kv:
Positive valve action (air open, electric open), then Kv> 0; valve reaction (air off, power off), then Kv <0;
The positive and negative values ​​of Ko and Kv are determined by the process object and production safety. According to the positive and negative values ​​of Ko, Kv and Ko*Kv*Kc >0, we can determine the positive and negative values ​​of Kc;
Regulator Kc:
If Kc> 0, the regulator is negative; if Kc <0, the regulator is positive; the software configuration must be set correctly, before the device commissioning and driving and P, I, D parameter setting, the positive regulator / Reactions must be checked and correct.
1. Before adjusting the P, I, D parameters of the regulating system, ensure accurate measurement and flexible valve operation;
2. When setting the P, I, D parameters of the adjustment system, make a good greeting and require the user to pay close attention to the production operation to ensure safe production.
3. When adjusting the P, I, D parameters of the adjustment system, first automatically post-cascade, first cast the secondary ring after the main ring, the secondary ring is thick, and the main ring is fine. At the operating station CRT, the adjuster adjustment window is opened, the setpoint SP or the output value OP is changed, a step signal allowed by the process is given, the measured value PV change and the trend graph are observed, and the PID parameters are continuously revised. It is often repeated several times until it is controlled smoothly. In practice, the first-order characteristics of a satisfactory process can generally be achieved.
Second experience PID tuning parameter preset
When the medium is a fluid (gas, liquid), the empirical PID tuning parameters are as follows: (It is better to set it in the software configuration before going out and fine tune or not to move to the site):
1, on the flow adjustment (F):
General P = 120 ~ 200%, I = 50 ~ 100S, D = 0S;
Anti-surge system: General P = 120 ~ 200%, I = 20 ~ 40S, D = 15 ~ 40S;
2. For pressure regulation (P):
General P = 120 ~ 180%, I = 50 ~ 100S, D = 0S;
For the vent system: General P = 80 ~ 160%, I = 20 ~ 60S, D = 15 ~ 40S;
3, level adjustment (L):
1], large containers (4 meters in diameter, more than 2 meters high tower): generally P = 80 ~ 120%, I = 200 ~ 900S, D = 0S;
2], in the container (diameter 2--4 meters, high 1.5-2 meters tower tank): General P = 100 ~ 160%, I = 80 ~ 400S, D = 0S;
3], small containers (diameter of 2 meters, 1.5 meters below the height of the tank): General P = 120 ~ 300%, I = 60 ~ 200S, D = 0S;
4, on the temperature regulation (T):
General P = 120 ~ 260%, I = 50 ~ 200S, D = 20 ~ 60S;
The above parameters are empirical and not absolute. In addition, in practice, sometimes there is a problem in the process object or valve (positioner) of a regulating system, and it can also be overcome by changing the PID parameter, so that the automatic input is made. The vote automatically requires patient observation and constant correction. Whether it can be put into practice in practice, the most critical is the valve (positioner), the actuator is easy to use, and the action is flexible.
In a cascade regulation system (eg, with 2 regulators), the entire inner ring (subadjustment, Ko1*Kv1*Kc1 >0) is equivalent to the Kv of the main ring, which is always positive. The result of tuning the PID parameters: Observing the curve, it is generally a first-order characteristic (of course, the second-order attenuation characteristic is theoretical).
Three automatic loop input considerations
1, the basic principles:
When the device is in operation, the automatic circuit should ensure the stable operation of each section. The main parameters can't fluctuate greatly. The pressure, liquid level, temperature and other parameters of other auxiliary equipments cannot have excessive fluctuations that affect the normal operation of the device.
2, with the process operator's cooperation:
The input of the automatic circuit belongs to the debugging work of the automation renovation project. If our personnel is responsible for the automatic return of investment, when doing this work, we should first explain to the user's operating personnel the contents of our work, how the process operators need to cooperate, and what impacts and how to deal with unexpected situations. The process operator should be informed afterwards. Prior to the initial input of the automatic circuit, the process operator should be required to adjust the operating conditions to a relatively stable state as much as possible.
3, control system specific matters needing attention:
(1) All automatic loop configurations should be rigorously tested prior to exit. If the configuration is changed in the field, the configuration of the signal flow and the correctness of the logic should be carefully checked before putting into operation. The signal switching part should pay attention to the timing of the switching logic.
The configuration should be such that there is a simple logic part that can do manual intervention at the exit of the automatic loop to the site, so that if there is a configuration error, the effect of the automatic loop on the site can be manually stopped.
(2) The PID module's proportional band and integral time value can be amplified firstly when the automatic operation is performed, and the PID module output upper limit and output lower limit can be placed within a permissible variation range near the current tracking output value of the PID module and the PID module output. The rate of change is small.
After the input is automatic, observe whether the movement direction of the PID module is correct, whether the change of the input deviation of the PID module is within the normal range, after confirming, release several output restrictions of the PID module one after another, restore their normal functions, and then adjust the quality according to Adjust the parameters of the PID module.
Four PID parameter tuning methods
1, basic knowledge
In the automatic adjustment system, E=SP-PV. Among them, E is the deviation, SP is the given value, PV is the measured value. When the SP is greater than PV, it is a positive deviation, and vice versa is a negative deviation.
1) The action of the proportional adjustment action is proportional to the size of the deviation; when the proportionality is 100, the output and deviation of the proportional action are 1:1 action of the respective range range. When the ratio is 10, press 10:1 to move. That is, the smaller the proportion, the stronger the proportional effect.
A too strong proportional effect can cause oscillations. Too weak results in an underbalanced proportion, resulting in too many fluctuation cycles in the system's convergence process and a low attenuation ratio. Its role is to stabilize the adjusted parameters.
2) The integral adjustment action and deviation are proportional to the integral of time. That is, there will be an output if the deviation has an integral action. It plays a role in eliminating residuals. A too strong integral action can also cause oscillations. Too weak will cause a residual error in the system.
3) The differential adjustment action is proportional to the rate of change of the deviation. The effect is to prevent all changes in the parameters being adjusted and to have the effect of advance adjustment. It has a good effect on large lagging objects.
However, pure lag cannot be overcome. Suitable for temperature regulation. Using differential adjustment can shorten the system's convergence cycle time. A long derivative time can also cause oscillations.
2, setting method
The empirical method is a trial and error method that is the simplest method of adjusting the system's most widely used tuning method. It is achieved through parameter presetting and trial and error. The preset value of the parameter depends on the characteristics of the object and the range of the meter. The large PID parameters of the instrument should be properly strengthened. The general range of the four types of adjusted parameters is as follows:

The critical proportionality method uses a pure ratio to put the system into automatic. At this time, the integral time is the largest and the differential time is 0. Gradually reduce the degree of proportionality, so that the system just appeared equal amplitude oscillations, record the proportion of this time Pbc and oscillation period Tc, and then calculate the PID proportionality and integration time as follows: P = 2.2Pbc; T = 0.85Tc. Actual conditions may exceed this range.
For objects with large time delay and time constants, the MACS PID should not use the critical scaling method, which is difficult to find Pbc.
Windows Tablet
C&Q Technology (Guangzhou) Co.,Ltd. , https://www.gzcqteq.com