Currently, the most common fall detection methods are video image analysis and wearable device detection. The former uses a video camera and cannot guarantee the privacy of the user; the latter is a sensor device that requires a base station to serve, and is easy to forget to wear when going out. Using a smartphone for fall detection is a viable and promising technology. The smartphone combines two important components of the fall detection system: fall detection and rescue communication, which not only reduces system cost, but also monitors human activity in real time. The user's fall position can also be determined in conjunction with GPS. Nowadays, relevant theoretical researches on the use of mobile phones for fall detection have been carried out at home and abroad, using the built-in acceleration sensors of mobile phones and different algorithms based on the acceleration characteristics of human motion to detect falls. However, some high-intensity daily activities such as jogging, quick sitting, etc. also produce a large acceleration value characteristic similar to the fall. Therefore, the acceleration sensor is used for fall detection alone, and the collected data is relatively single, which is not enough to completely reflect the change of the human body posture, and will bring many false alarms to the fall detection. Aiming at the above problems, this paper proposes a fall detection algorithm based on the combination of signal vector mode and feature quantity W. The detection algorithm simultaneously uses the acceleration sensor and the gyroscope to monitor the change of the human body posture, and effectively reduces the false positive and false negative of the fall detection result.
1 Fall detection method design
The acceleration sensor and the gyroscope can measure the motion acceleration and angular velocity information in the three-axis direction respectively. This paper uses the two sensors built into the smartphone to collect the signal data reflecting the main motion posture changes of the human body. By using the signal of signal vector (SVM) threshold method to identify the acTIvi of the daily living (ADL) and the fall, for the higher-intensity ADL that cannot be identified by the threshold method, the diagonal velocity signal is passed. The vector mode data is further processed to determine the new feature quantity.
1.1 Signal data
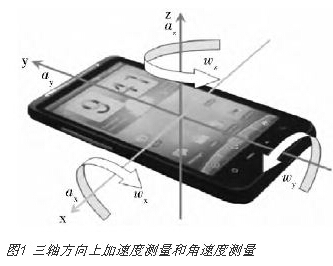
Human activities are mainly divided into the following types: lying down, walking, sitting down - standing up, going up stairs, going down stairs, jogging, kneeling - standing up and falling. The smart phone carried by the human body, its built-in acceleration sensor and the signal data output by the gyroscope can reflect the changes in the daily movement posture of the human body. Figure 1 shows the direction of acceleration and angular velocity of the smartphone in the x, y, and z axes.
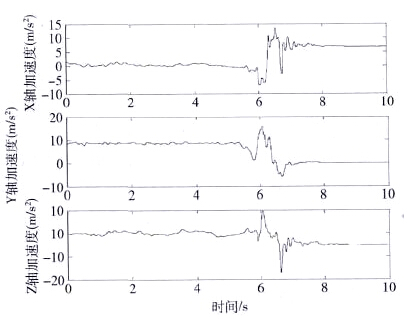
The sensor output signal is doped with a large amount of impulse noise, and median filtering is a traditional method of eliminating impulse noise. The median filter is a nonlinear signal processing technique that uses a window of a given length to sequentially slide over the original sequence of signals, and then replaces the sample values ​​centered in the window with the median of the sequence of signals contained in the window, where the filter The window size n is set to 3. Figure 2 is a graph of the acceleration sensor output signal data after median filtering.
1.2 Signal Vector Mode (SVM)
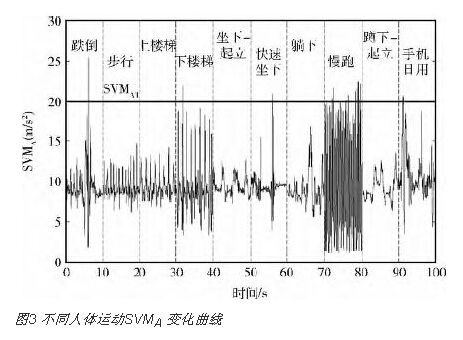
The acceleration and angular velocity changes when the fall occurs are mainly reflected in a certain spatial direction. Because the fall direction cannot be predicted in the fall event, it is not appropriate to use the acceleration or angular velocity data of a certain axis to judge the occurrence of the fall. The signal vector modulus SVM feature can be used. Accumulate the acceleration or angular velocity of the space into a vector. The acceleration signal vector mode (SVMA) and the angular velocity signal vector mode (SVMW) are defined as equations (1) and (2), respectively.
Among them, ax, ay, and az are the median filtered signals outputted by the acceleration sensor x, y, and z in three directions; wx, wy, and wz are the gyro x, y, z triaxial direction outputs after median filtering. signal of.
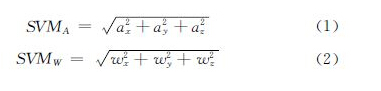
Figure 3 and Figure 4 show the SVMA and SVMW curves when the human body is in different motion states.
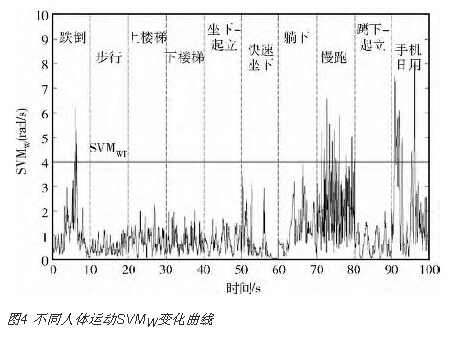
As shown in Fig. 3 and Fig. 4, the fall has the characteristics of large acceleration and angular velocity peaks. This is because the SVM peak generated by collision with low-level objects during the fall is larger than most general processes such as walking and climbing stairs in daily activities. . However, the process of human motion is complex and random. Using a single acceleration-related information to judge the occurrence of human fall behavior will bring a lot of misjudgment. In this paper, the information threshold method combined with SVMA and SVMW can distinguish between low-intensity movements with small fall and SVM peaks. By analyzing the experimental results data SVMA and SVMW during the human body fall process and other daily life behaviors, this paper identifies the fall acceleration signal vector mode threshold as SVMAT = 20m/s2 and the angular velocity signal vector mode threshold as SVMWT = 4rad/s.
However, jogging and other actions also have the characteristics of large acceleration and angular velocity peaks. The individual SVM feature quantity cannot distinguish between the falling process and the higher-intensity motion process such as jogging or mobile phone daily use.
1.3 SVMW data curve processing
According to the kinematics of the human body, the fall angle or the roll angle change of the human body during the fall process is quite different from that of the jog. However, the position of the smart phone that collects the signal of the human body's motion change signal is arbitrary in the pocket, so it cannot be The angle change information obtained by directly outputting the uniaxial direction of the gyroscope is used as a feature amount of the fall judgment. In this paper, the angular velocity signal vector modulus data is further processed to find new feature quantities.
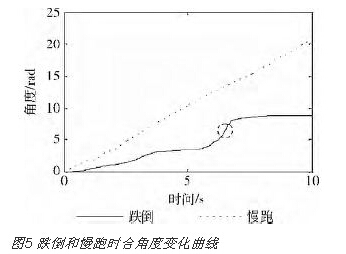
Here, the angle θ of the torso tilt when the human body falls is defined, which is obtained by integrating the vector data of the angular velocity signal, as follows.

Where: SVMW ——— Human motion angular velocity signal vector mode. Let's take jogging as an example to analyze the difference of the angle curve of the higher intensity exercise such as fall and jog. Figure 5 shows the angle change curve of the two movements of fall and jog. From Fig. 5, it can be seen that the fall curve is obvious. The inflection point (shown by the circle in the figure), while the jogging curve changes more evenly and gently. This is because the human body will collide with low-level objects during the fall, and a large SVM data value will be generated in a short time, and there will be a sudden incremental point on the data curve; while the jogging is basically the same every time, with time The resulting data curve point increments are also basically the same, and the data curve approximates a straight line.
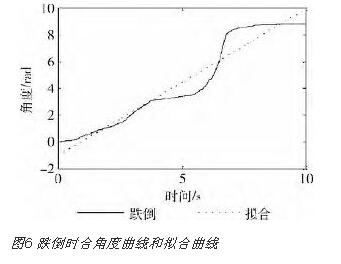
Using the smart phone as a fall detection system, it is easy to formulate the data. In this paper, the data fitting method is used to formulate the angle curve data. In the previous analysis, it is known that the trend of the angle curve of the two motion processes is very different, and the angle curve of the jog motion is approximately a straight line. Therefore, the straight line fitting model can be used to highlight the similarity between the two curves and the respective fitting curves. different. Here we use a simple calculation of the least squares linear fit, fitting the line expression to
y=ax+b (4)
Where: a, b———the slope and intercept of the fitted line. Figure 6 and Figure 7 show the combined angle curves of the two movements of falling and jogging, respectively, and the linear fitting curve using Matlab.
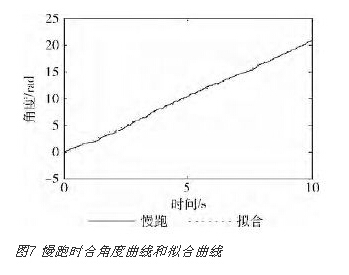
In order to reflect the similarity between the two curves and their respective linear fitting curves, we define a dimensionless quantity W, which is also the fall judgment feature of the algorithm. The calculation process is as follows
Where i = 1, 2, 3, ..., 500, (processing data sample points within 10s), Ci is the angled data sample point, and Ni is the angled linear fit data sample point. The feature quantity W reflects the similarity between the angled curve and its fitted curve, and the smaller the W value, the higher the similarity.
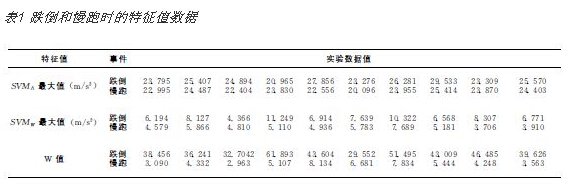
From the previous analysis, it is known that the fall and angle curve has an inflection point, the jog angle curve changes gently, and the fitting curve used is a straight line, so the W value obtained when falling is larger, and the W value obtained when jogging is higher. small. Table 1 shows the eigenvalues ​​of a set of experimental results. Observing the eigenvalue data, it is easy to distinguish between the two motion processes by setting a threshold WT. This paper analyzes the W value during the high-intensity motion such as the fall process and jogging. Take WT = 25.
2500 - 3500 Puffs (included)
Shenzhen Zpal Technology Co.,Ltd , https://www.zpalvapes.com