The problem of local vision localization of mobile robots is studied. Firstly, the position and time series of the target centroid feature points are obtained by the mobile robot visual positioning and target tracking system. Then, based on the analysis of the defects of the target depth information by the quadratic imaging method, a spatial position and motion information of the target are proposed. Methods. The method utilizes sequence images and extended Kalman filtering, and the target acquisition uses the HIS model. Under the condition that the mobile robot satisfies a certain maneuver, the spatial position and motion information of the target are obtained more accurately. Simulation results verify the effectiveness and feasibility of the proposed method.
Sports vision research is how to extract the shape, position and motion information of the target in the scene from a series of different moments of the scene, and apply it to the navigation and positioning of the mobile robot. Firstly, the spatial position and motion information of the target should be estimated, which provides a key premise for the navigation and positioning of the mobile robot body.
The acquisition of visual information is mainly through a single visual method and a multi-visual method. The single vision mode is simple in structure, avoids visual data fusion, and is easy to implement real-time monitoring. If the geometric model of the target object is used, information such as the position of the target can be obtained by taking three or more feature points on the target. This method must ensure that the positional relationship of the set of feature points in different coordinate systems is consistent, and for the general binocular vision system, the calculation error of the coordinates tends to destroy this relationship.
This paper studies the motion vision localization method of mobile robot by using the local visual positioning method of installing the vehicle camera on the robot. The implementation of the method is divided into two parts: Firstly, the positional time series of the target centroid feature points are obtained by using the mobile robot vision system, so that the tracking of the tracked target is converted into the tracking of its centroid; then it is estimated by the generalized Kalman filter method. The spatial position and motion parameters of the target.
1. Geometric model of target imaging
The coordinate relationship of the mobile robot vision system is shown in Figure 1.
Where O-XYZ is the world coordinate system; Oc-XcYcZc is the camera coordinate system. Where Oc is the optical center of the camera, the X-axis and the Y-axis are respectively parallel to the Xc-axis, the Yc-axis, and the x, y-axis of the image, and Zc is the optical axis of the camera, which is perpendicular to the image plane. The intersection O1 of the optical axis and the image plane is the origin of the image coordinate system. OcO1 is the focal length of the camera f.
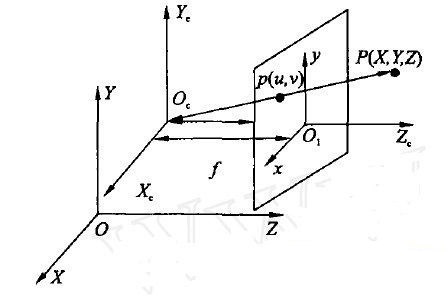
Figure 1 Coordinate relationship of mobile robot vision system
Regardless of lens distortion, the perspective projection imaging model is:
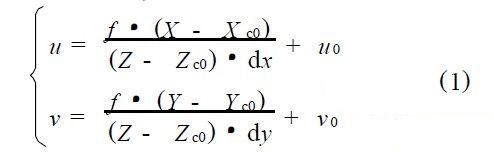
Where Z'=[u,v]T is the two-dimensional coordinate value of the target feature point P in the image coordinate system; (X,Y,Z) is the coordinate of the P point in the world coordinate system; (Xc0,Yc0,Zc0 ) is the coordinate of the optical center of the camera in the world coordinate system; dx, dy is the quantization factor of each pixel of the camera sampled in the x-axis and y-axis directions; u0, v0 are respectively the image center O1 of the camera on the x-axis and y The amount of positional offset when sampling in the axial direction. The transformation of the point P position in the image coordinate system and the world coordinate system can be realized by the formula (1).
CAT5E Keystone Jack is an integral parts of RJ45 networking connectors for speed voice, video, data server center, CAT5E keystone jacks are an integral part of any high speed voice, data, or video network. These standardized female connectors are used for inserting multi-conductor Ethernet cable into wall plates, patch panels, or surface mount boxes. The Uonicore offer excellent value and selection with our line of keystone jacks including: MIG+, shielded, high density, tool-less, and snap-in styles
CAT5E Keystone Jack,UTP CAT5E Keystone Jack,Keystone Jack CAT5E,Cat5e Jack
NINGBO UONICORE ELECTRONICS CO., LTD , https://www.uniconmelectronics.com