Author: Arek Dutka - Industrial Systems and Control Limited
Gustav Ferrao-Industrial Systems and Control Limited
"In today's software used in the automotive industry, LabVIEW has two main advantages: one is its front panel, which can be used as a powerful user interface; the other is its vivid development environment, which can avoid low-level language programming.
challenge:
Simulate multiple variables to verify complex automotive engine designs to obtain optimal fuel consumption, engine performance, and exhaust emission control.
solution:
Using the NI LabVIEW control design and simulation module, we have developed an application that can perform real-time control, analysis, and testing.
Today, automotive powertrain control systems must maintain continuous development to meet requirements. These requirements include adjusting exhaust emissions to meet increasingly stringent emission standards; providing better fuel consumption to comply with the company's average fuel consumption standards; and meeting user needs for performance and comfort.
These requirements are interrelated and even often contradictory. For example, lean burn technology can significantly reduce fuel consumption, but at the same time reduce the efficiency of three-way catalytic conversion, resulting in additional air pollution.
There are two ways to meet today's automotive specifications, one is to improve the existing structure, and the other is to introduce new and more complex mechanical designs.
Among the parameters that determine engine performance, the camshaft profile is the most important design parameter.
In the design process, some engines focus on meeting the needs of torque, while others focus on optimizing speed, so there is no certain shape that can meet all design parameters.
Double overhead camshaft (DOHC) engines mainly have four variable cam timing strategies:
• Only intake cam phase shift (only intake)
• Only the exhaust cam phase shift (exhaust only)
• The intake cam and exhaust cam have equal phase shift (both are equal)
• Independent phase shift of intake cam and exhaust cam (dual independent)
In the twin-independent variable camshaft engine (TIVCT), the intake camshaft and exhaust camshaft are corrected independently. The amount of change is a function of valve position and engine speed.
In order to improve engine performance, the system provides a lot of freedom. Because of this, it is necessary to find a way to optimize the valve timing parameters to obtain the best fuel consumption, engine performance and emission control.
However, the result of this technology is a highly complex real-time control algorithm. Although TIVCT has been introduced into the field of automotive engines a few years ago, it is still the focus of research and exploration today.
Use LabVIEW to complete real-time control, analysis and testing
This project is based on TIVCT engine modeling and optimal controller design to meet special engine performance requirements. The goal of the control strategy is to provide a reference amount of torque tracking for the engine, while minimizing the fuel consumption rate during braking, and optimizing the stability of fuel combustion.
Use LabVIEW control design and simulation module and its own linear algebra function to complete this project. In today's software used in the automotive industry, LabVIEW has two main advantages: one is its front panel, which can be used as a powerful user interface; the other is its vivid development environment, which can avoid low-level language programming.
In addition, many of NI's hardware integrate tools for control, design, and simulation to facilitate real-time control, analysis, and test applications. This also makes LabVIEW attractive to the automotive R & D department.
For the engine model, the most important variables for the operation of the control system include the air flow of the intake manifold, the position of the independent camshaft at the inlet, and the exhaust time of the exhaust valve relative to the crankshaft.
The control output is the engine torque, the fuel consumption rate of the brake and the coefficient of variation of the average effective pressure indication. Other variables that affect system performance (such as engine speed and engine coolant temperature) are used as external parameters and used as scheduling variables in the control system.
By using the LabVIEW control design and simulation module, the time-continuous TIVCT engine model combines a static typical combustion process characteristic equation with a differential equation describing the driver and intake manifold to obtain a dynamic model.
The resulting nonlinear TIVCT engine model has the characteristics of multiple input and multiple output (Multiple input, multiple output, MIMO). By manipulating each input variable, the input-output relationship has a clear cross effect. In this control application, LabVIEW was used to set the system at a specific operating point and a non-linear engine model was linearized, thereby developing a linear model.
Interactive simulation using LabVIEW front panel
An advanced optimized controller is designed using the linear quadratic regulator (LQR) in LabVIEW. Functionally, this controller accomplishes two goals: minimizing offset and achieving the role of the calibrator. In the case of external interference, the steady-state error can be eliminated by introducing the integral within the loop, thereby achieving the design goals of the above controller.
In order to define the performance index and minimize the output error and output change rate, LabVIEW is used to perform state feedback and reference point tracking on the TIVCT engine based on the optimization of the continuous time-domain system, and the expected gain is obtained through the tool.
Local controllers and linear models are built and simulated in LabVIEW. While minimizing the brake fuel consumption rate (BSFC) and the average indicated pressure variation coefficient (COVIMEP), the system tracks the engine torque through an accurate steady-state value related to the set value.
Placing the two tuning variables Q and R on the front panel can ensure intuitive detection and online adjustment of the controller, which also makes full use of the characteristics of LabVIEW interactive simulation.
In order to easily transfer the simulation to the computer hardware for final application, the model and controller are usually applied to the discrete-time system. Discrete controllers can be derived from continuous controllers, or they can be redesigned directly in discrete-time systems using the same linear quadratic regulator VI.
Since the model is non-linear, the ideal gain parameter that produces the expected response at one operating point may not produce the same satisfactory response at another operating point.
Therefore, it is necessary to achieve gain scheduling by using corresponding ideal gain parameters in different working ranges of the nonlinear model. Complete the interactive adjustment of parameters through the front panel to rationalize the process of gain tuning.
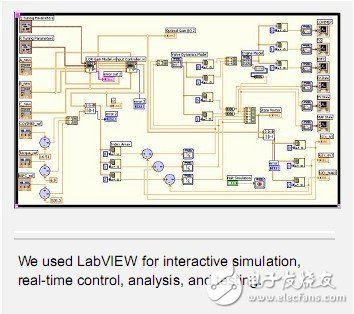
Use LabVIEW for interactive simulation, real-time control, analysis and testing 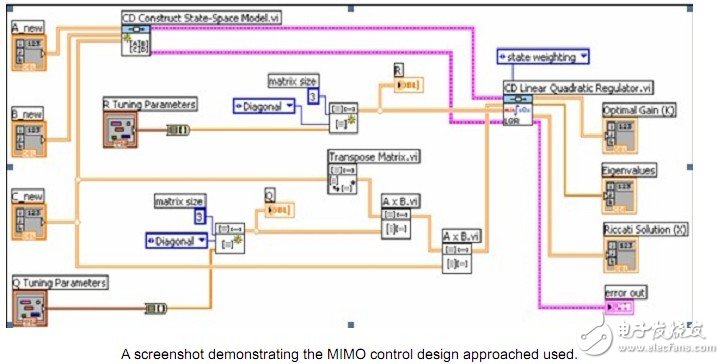
Screen capture demonstrating multiple input multiple output control (MIMO) design method
2.54mm Female Header Connector
Shenzhen CGE Electronics Co.,Ltd , https://www.cgeconnector.com