Based on the successful experience of embedded systems in the fields of electronic technology, signal processing and computer, based on the analysis of target detection and tracking algorithms, the target detection and tracking algorithms are combined with embedded technology to design an embedded system. The target detection and tracking system of PIC32 MCU can realize the miniaturization and intelligentization of the target detection and tracking system, and the target recognition and tracking are carried out with specific flight targets as an example.
Research purposes
With the continuous expansion of the demand for military and civilian equipment in modern society and the continuous improvement of requirements, the recognition and tracking technology of moving targets has rapidly developed into a very important technology in the field of modern information processing, and it is also a field reconnaissance technology for drones. The key points and difficulties, and play an irreplaceable role in many fields. At present, PC-based target detection and tracking technology has matured, but its application research on embedded platforms is still in its infancy. Because the embedded system has the advantages of small size and easy to carry and a series of PCs can not be replaced, how to effectively detect and track the flight target and realize it in the embedded system is an urgent problem to be solved. Aiming at the above problems, this paper designs an embedded target detection and tracking system. The system has the characteristics of small size, good real-time performance and effective real-time tracking of moving targets. It has also been a useful attempt to develop a real-time miniaturized embedded machine vision system.
System overall plan
This topic studies the embedded implementation of the target detection and tracking of the UAV in a complex background environment. The target tracking system uses a movable image processing device to realize the detection and tracking of moving objects in the image, and solves the military use. And industry and other aspects to develop the miniaturization requirements of the target tracking system.
1. Mainly study the following aspects:
(1) Hardware design of embedded vision tracking system
The embedded platform is an effective way to solve real-time and miniaturization. The solution of the target tracking system based on the PIC32-based embedded platform can meet the requirements of device functions.
For the actual needs of miniaturization, the system uses a USB camera as the device to capture the target image, and uses the PIC32 core development board as the central controller, as well as peripheral devices such as pan/tilt and pan/tilt controllers to form a complete visual feedback tracking system.
(2) Software design of embedded visual tracking system
According to the characteristics of the tracked target, design real-time recognition and tracking algorithm, use the embedded system software MPLAB IDE integrated development environment specific development system data acquisition, feature recognition and feedback control software modules, using MPLAB C32 C compiler to track the target The algorithm is compiled and implemented to realize the recognition and tracking of moving targets.
(3) Simulation experiment, debugging
The tracking experiment was carried out on the designed embedded experimental platform, and after repeated debugging, until the effect of the test tracking reached the expected requirements.
2 Research plan
According to the above research content, the embedded implementation of the target detection and tracking scheme is divided into two parts: hardware and software.
Hardware solution for embedded vision tracking system:
The system hardware structure diagram is shown in Figure 1:
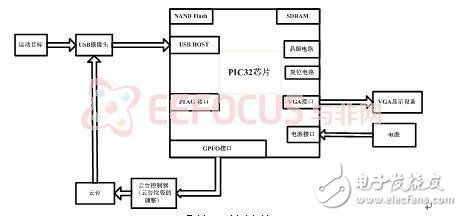
Figure 1 system hardware structure diagram
The overall hardware structure of the system is shown in Figure 1. Migrate and configure the MPLAB IDE integrated development environment on the PIC32 embedded system platform, create appropriate file systems and write applications for platform and application features. The moving target is collected by the USB camera and sent to the PIC32 processor. The powerful computing power of the embedded processor is used to process the acquired image, complete the target recognition and positioning, control the PTZ controller, and adjust the camera pose. , so that the camera is aimed at the moving target for real-time tracking. Good real-time and small size are the goals pursued by this embedded tracking system.
Software solution for embedded vision tracking system:
(1) MPLAB C32 C compiler
C code application: The 32-bit language tool library is located in the pIC32mx\lib subdirectory of the MPLAB C32 C compiler installation directory. By default, it is stored in: C:\Program Files\Microchip\MPLAB C32\pic32mx\lib via MPLAB C32 The linker links these libraries directly into the application.
(2) startup code
To initialize variables in the data store, the linker creates a data initialization image. This image must be copied to RAM at startup and before the application gains control. The startup code in crt0.o performs initialization of the runtime environment.
(3) 32-bit peripheral function library
The 32-bit software and hardware peripheral libraries provide functions and macros for setting up and controlling 32-bit peripherals. These libraries are processor-specific and are of the form libmchp_peripheral_Device.a, where Device is a 32-bit device model.
(4) Standard C function library (including mathematical functions)
A complete set of ANSI-89 compliant libraries is available. The standard C library files are libc.a (written by MIPS Technologies), libe.a, and libm.a. A typical C application must contain all three libraries, which are linked by default without user-specified.
CD Car Phone Holder,Car CD Slot Mount Holder,Car Phone Mount Holder,Car Accessory CD Phone Holder
Ningbo Luke Automotive Supplies Ltd. , https://www.nbluke.com